You've already forked NeuralNetwork_Based_AutonomousCar
mirror of
https://github.com/Reiko0908/NeuralNetwork_Based_AutonomousCar.git
synced 2026-05-04 13:15:37 +00:00
NeuralNetwork_Based_AutonomousCar
Project Overview
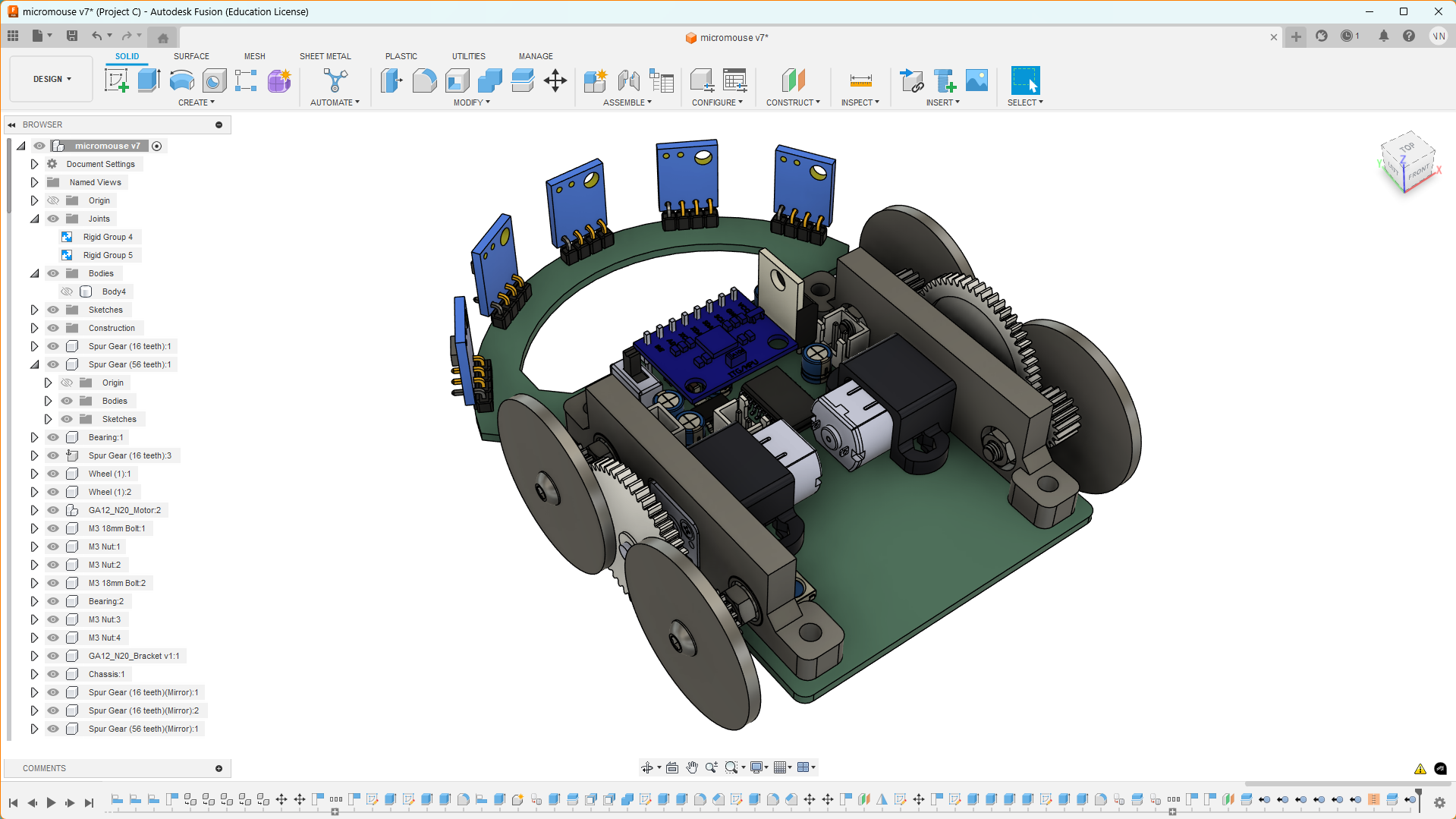
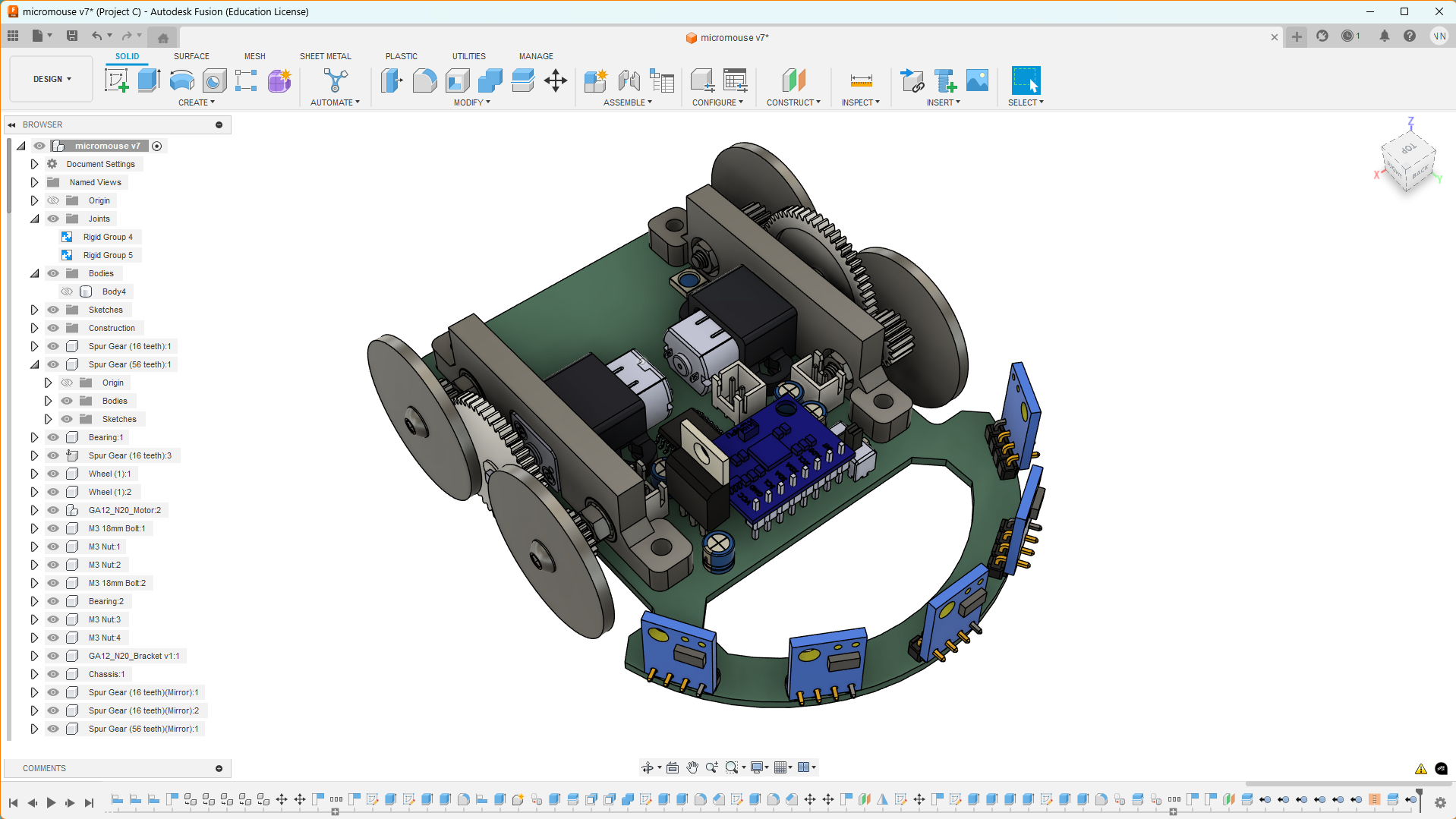
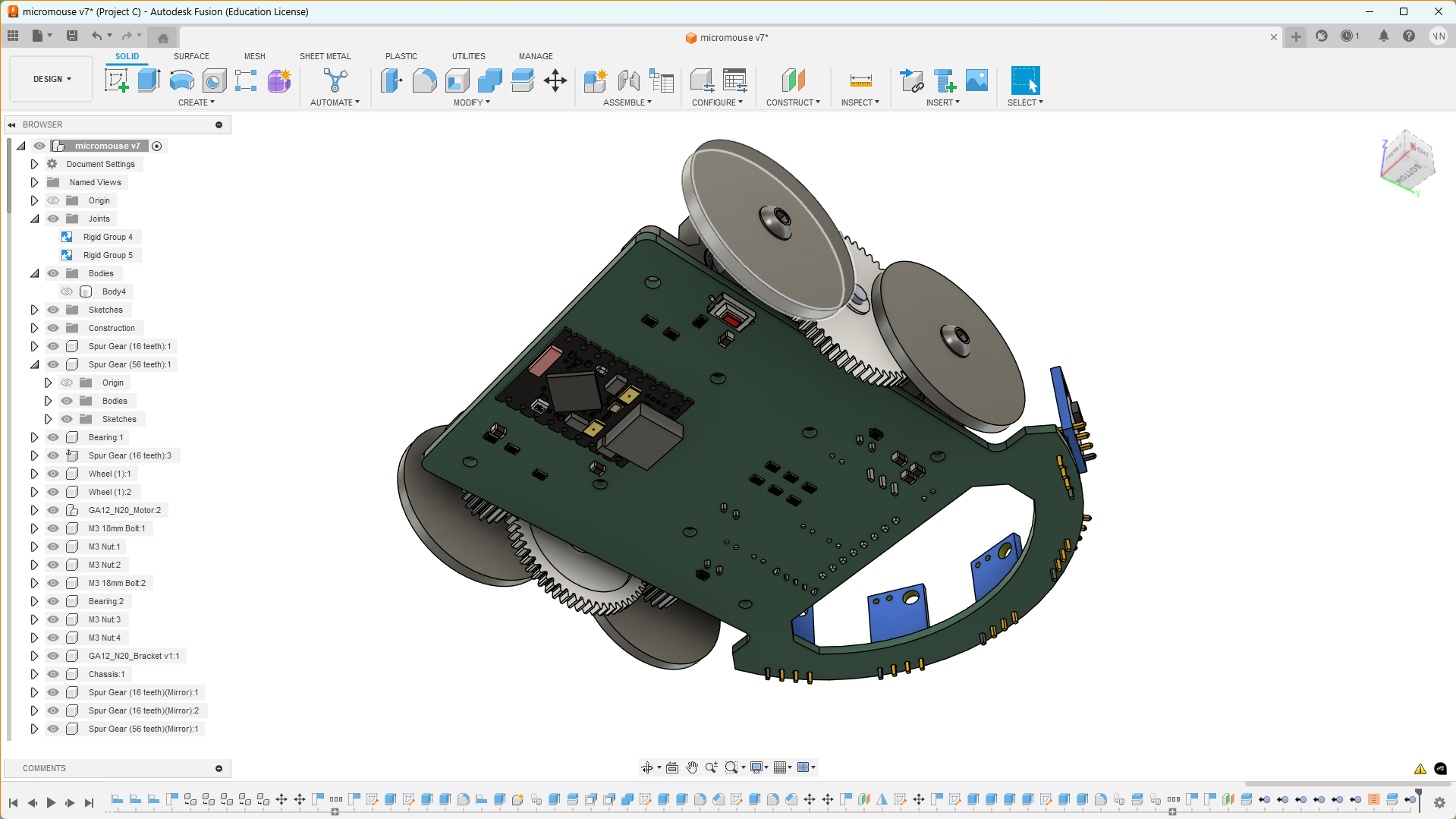
This project focuses on developing an autonomous car system powered by neural networks (NN). Inspired by the design architecture of micromouse, the car is designed to navigate autonomously using deep learning techniques. The project leverages deep learning and neural network models to enable the autonomous functionalities of the car. The neural network processes real-world sensor data to make real-time decisions for the car's navigation. The project timeline is divided into several stages:
- Concept Development: Initial phase where the concept was developed.
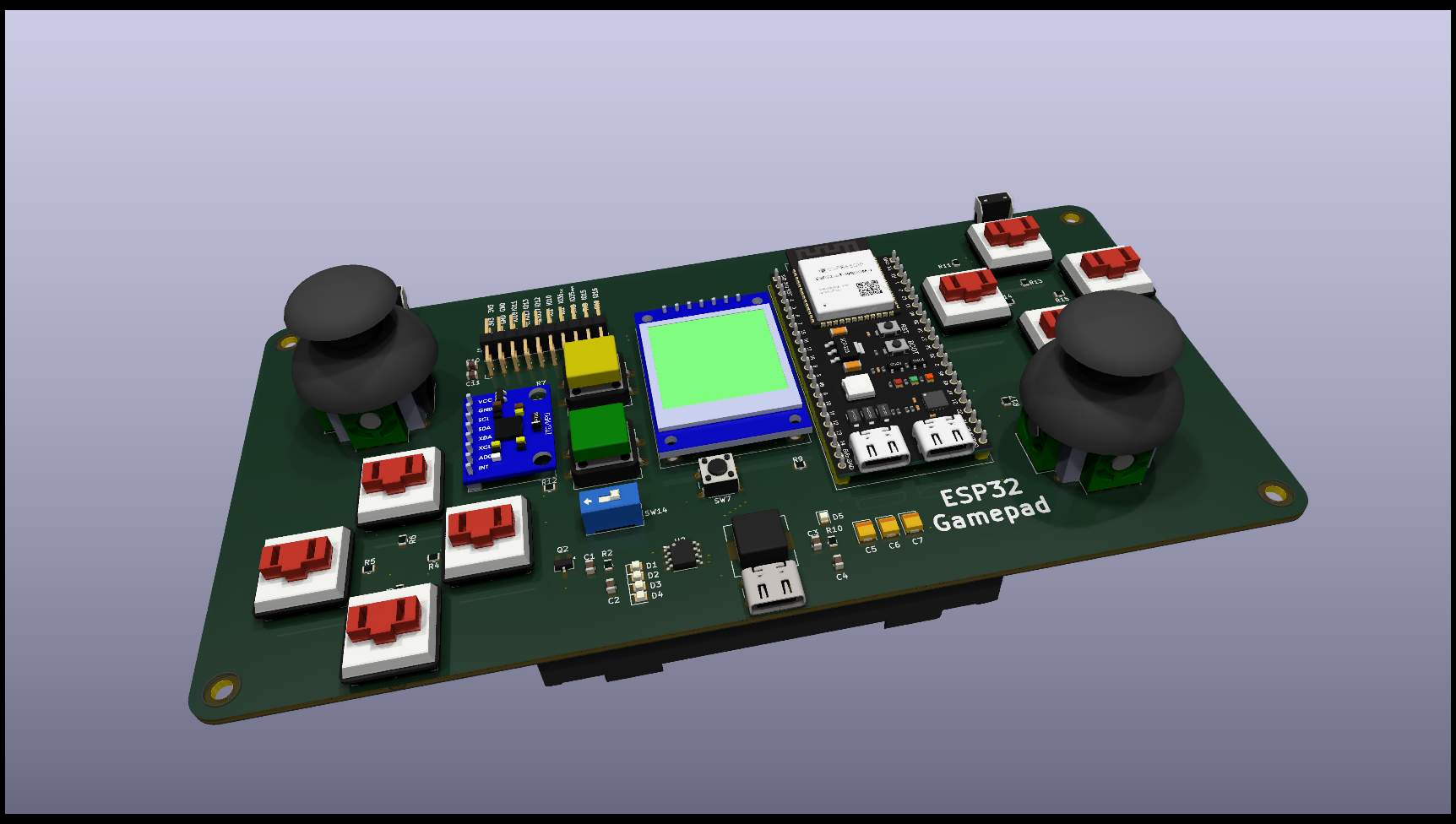
- Gamepad PCB Design: Creation of the gamepad hardware to control the car.
- Autonomous Car Design: Currently in progress, focusing on the car's hardware and software integration.
- Neural Network Training: Future phase where the model will be trained.
- Documentation: Final phase to document the project.
Software Architecture
- Data Collection: Using the gamepad (now replaced by computer control) to navigate the car in a physical map with walls. The sensors collect data and transmit it to the ESP32-S3 on the computer.
- Machine Learning Training: Utilizing Python and TensorFlow to train the neural network model.
- Deployment: Importing the trained model configurations to the car for autonomous navigation.
Hardware
Car Hardware
- ESP32-S3 Super Mini: Main microcontroller used in the car.
- GY87 9-DOF IMU: Inertial measurement unit for orientation and motion sensing.
- 5 VL53L0X Sensors: Distance measurement sensors for mapping the environment.
- L293DD Motor Driver: Controls the motors of the car.
- GA12 N20 Motor: Motor with a step-up gearbox of 56:16 for movement.
- 2S Lipo Battery
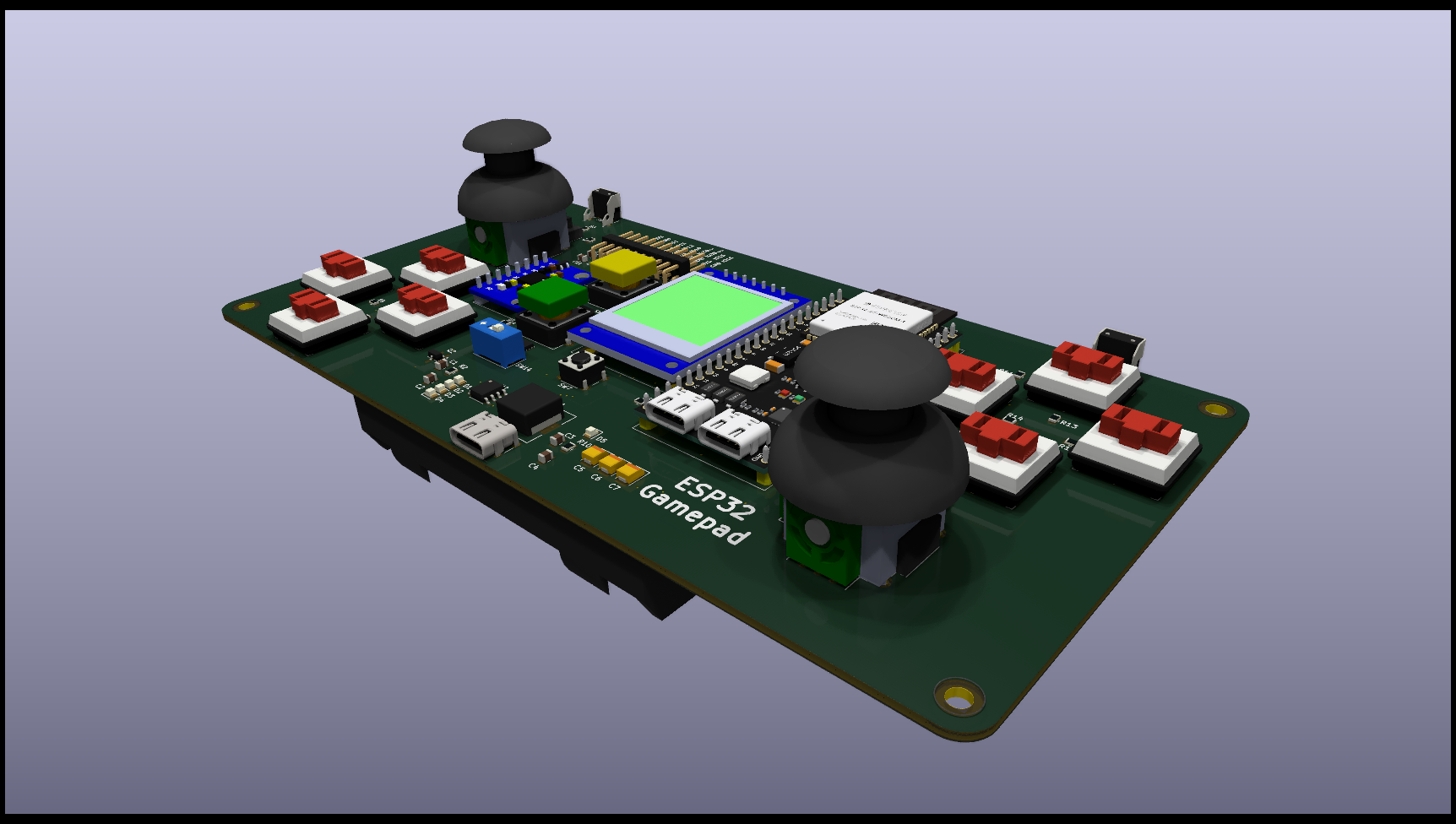
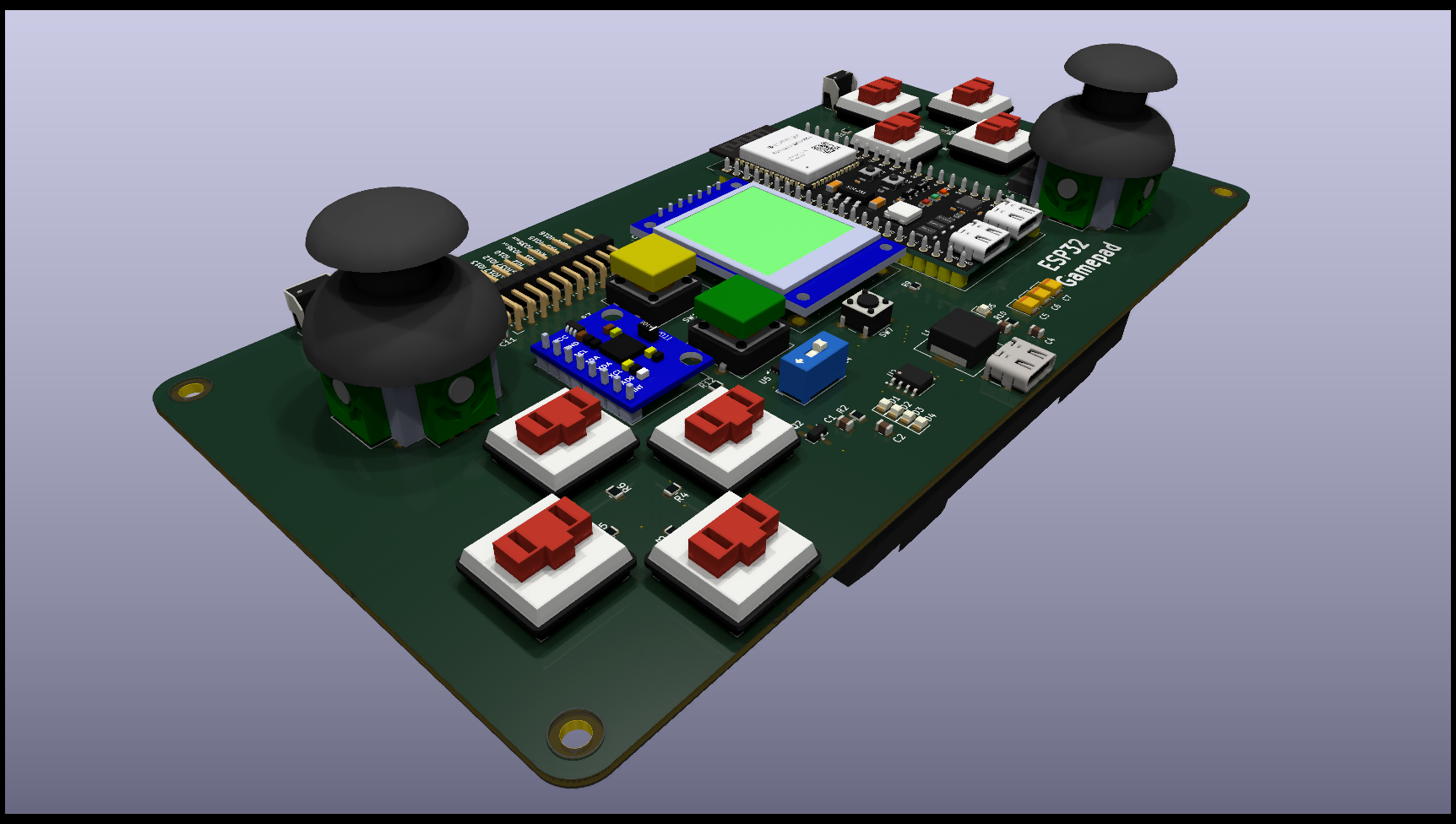
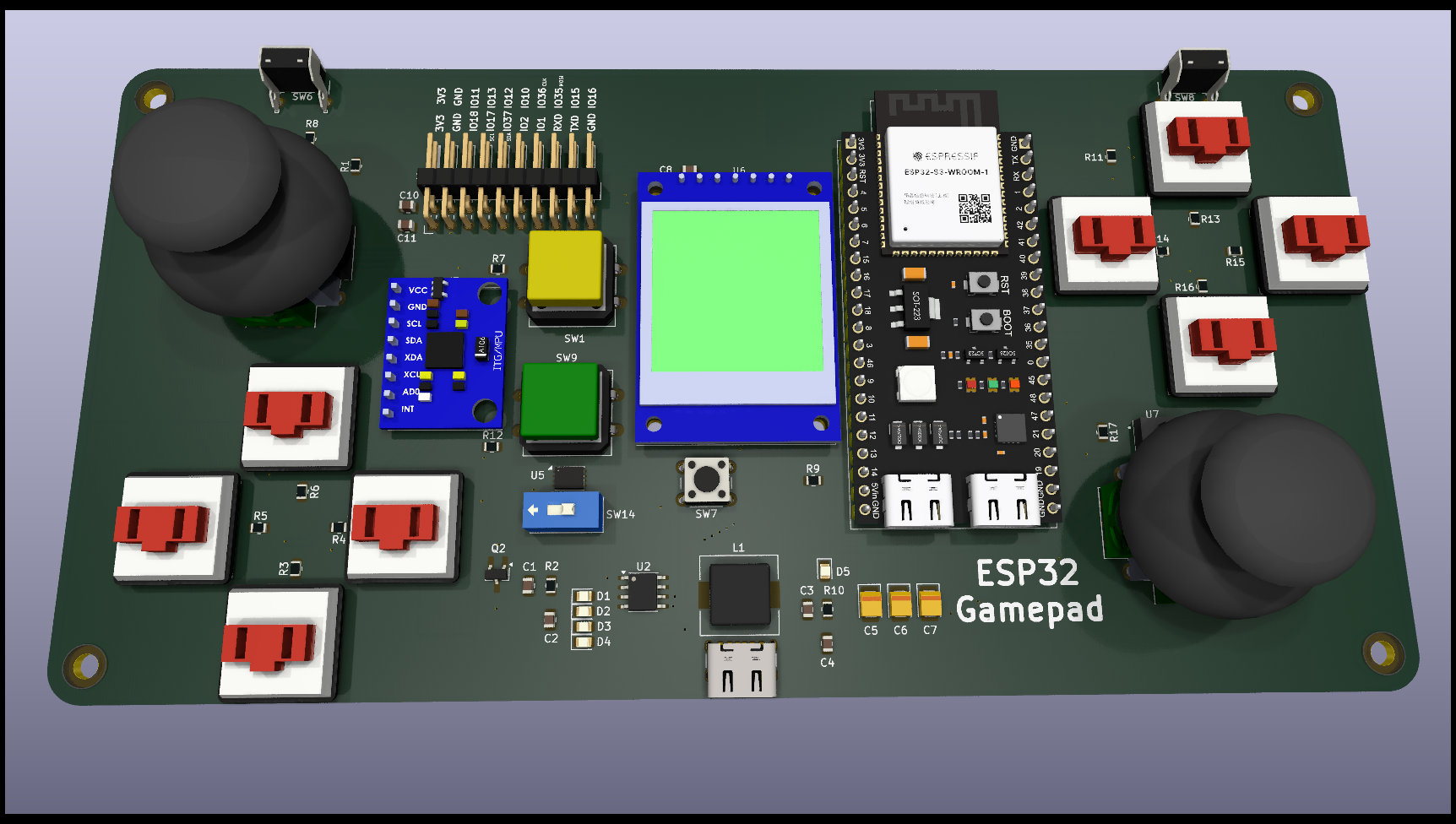
Gamepad Hardware
- Joysticks
- MPU6050 6-DOF IMU
- ESP32-S3 N16R8
- ST7789 LCD TFT SPI Screen
- IP5306 for Power Management
- Low Profile Switches
- Single-cell 18650 Battery
- Additional Buttons and Pin Headers
Machine Learning Training Procedure
- Collecting Data: Create a physical map with walls and use the gamepad (now our computer) to control the car. The 5 VL53L0X sensors onboard will collect map data, transmit them to the ESP on the computer.
- Training the Model: Use Python with TensorFlow library to train the neural network model.
- Deployment: Import the trained model configurations to the car and let it navigate autonomously.
Milestone Pictures
- Micromouse Design Inspiration
- Gamepad PCB







Additional Information
The gamepad PCB encountered a hardware issue that cannot be fixed in time. As a workaround, we will use an external ESP32-S3 connected to the computer to control the car via BLE. We will continue to develop and improve the project.
Author: pacman314159